
티스토리 뷰
터미널 4개 사용
아래처럼 터미널을 띄우고 싶다면 <CTRL-ALT-T>로 터미널을 하나 띄운 뒤,
나머지 3개의 터미널은 <CTRL-SHIFT-T>로 띄우면 된다.
1. roscore 실행 및 확인
터미널#1에서
roscore
터미널#4에서
rosnode list
2. turtlesim 노드 실행 및 확인
터미널#1 (roscore)가 실행중인 상태에서 아래 실습을 진행한다.
터미널#2에서
rosrun turtlesim turtlesim_node
터미널#4에서 확인
rosnode list
3. turtle_teleop_key 실행 및 확인
터미널#1 (roscore) 와 터미널#2 (turtlesim node)가 실행중인 상태에서 아래 실습을 진행한다.
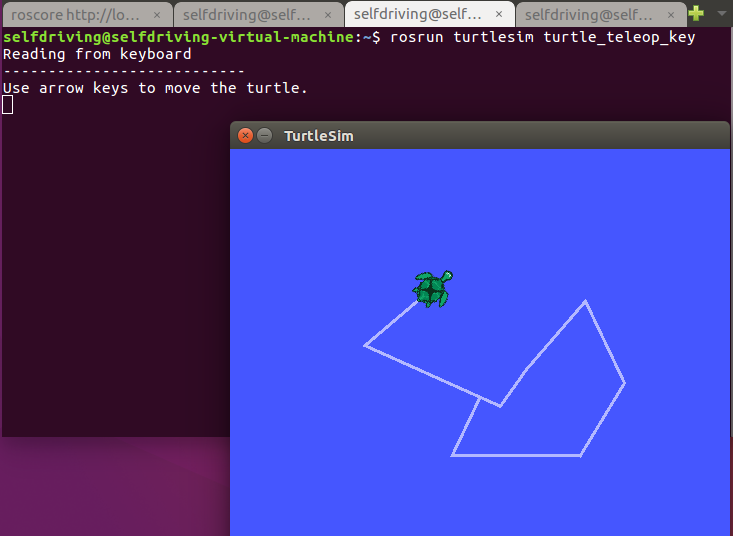
터미널#3에서
rosrun turtlesim turtle_teleop_key
여기서 상하좌우 화살표키를 누르면 거북이가 그에 따라 움직인다.
터미널#4에서 아래 명령어들 쭉 실행.
1) 노드 리스트
rosnode list
2) 토픽 리스트
rostopic토픽과 관련한 명령어들을 확인할 수 있는 명령어이다.
현재 활성화된 토픽 리스트를 받고 싶으면 rostopic list 명령을 실행하면 된다.

rostopic list어떤 토픽이 날아다니는지 살펴볼 수 있는 명령어이다.

rostopic list -v-v옵션은 더 자세하게 알 수 있다.
publish되는 토픽과 subscribe되는 토픽을 알 수 있다.
또 각 토픽에 대해 publisher와 subscriber 개수도 알 수 있다.

3) 토픽 메세지 확인
rostopic echo /turtle1/cmd_vel해당 토픽에 담긴 메세지의 내용을 볼 수 있다.
/turtle1/cmd_vel 자리에 원하는 토픽 이름을 쓰면 된다.
여기서 터미널#4에서 cmd_vel값을 확인하기 위해서는 터미널#3에서 화살표키를 이용해 거북이를 움직여야 한다.
이 명령어를 중지하고 싶다면 <CTRL-C>를 눌러서 종료하면 된다.

4) 노드와 토픽 관계 시각화
rqt_graph노드와 토픽 관계를 시각화하는 명령어이다.
파란색 노드는 publisher node이고, 초록색 노드는 subsriber node이다.
빨간색은 전달되는 토픽의 이름이 적혀있다.

5) 메시지의 타입과 구성
rostopic type /turtle1/cmd_vel이 토픽에서 발행하는 메시지의 type을 확인하는 명령어.
rosmsg show geometry_msgs/Twist이 타입의 메시지는 어떻게 구성되어 있는지 확인하는 명령어.

6) 토픽 직접 발행
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0,0.0,0.0]' '[0.0,0.0,1.8]'-1 : 발행을 1번만
/turtle1/cmd_vel : 토픽 이름
geometry_msgs/Twist : 메시지 타입
-- '[2.0,0.0,0.0]' '[0.0,0.0,1.8]' : 메시지 내용
주의할 점은 -- 뒤에 띄어쓰기 한 칸 있다.

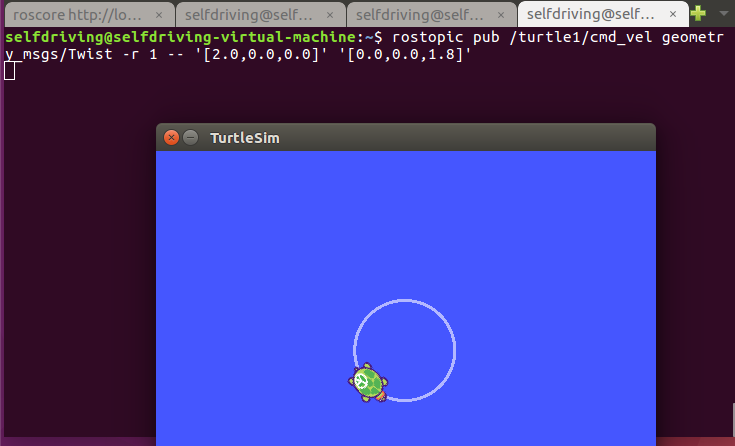
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0,0.0,0.0]' '[0.0,0.0,1.8]'/turtle1/cmd_vel : 토픽 이름
geometry_msgs/Twist : 메시지 타입
-r 1 : 발행 주기는 1Hz (1초에 1번씩)
-- '[2.0,0.0,0.0]' '[0.0,0.0,1.8]' : 메시지 내용.
주의할 점은 -- 뒤에 띄어쓰기 한 칸 있다.
그만 발행하고 싶으면 <CTRL-C>로 위 명령어를 종료한다.
참고 : wiki.ros.org/
Documentation - ROS Wiki
ROS (Robot Operating System) provides libraries and tools to help software developers create robot applications. It provides hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and more. ROS is licensed under
wiki.ros.org
'ROS' 카테고리의 다른 글
| Ubuntu16.04 ROS Kinetic - subscriber python파일 작성 및 실행 (0) | 2020.12.22 |
|---|---|
| Ubuntu16.04 ROS Kinetic - publisher python파일 작성 및 실행 (0) | 2020.12.22 |
| Ubuntu16.04 ROS Kinetic - 패키지 생성 (0) | 2020.12.22 |
| Ubuntu16.04 ROS Kinetic workspace 생성 (0) | 2020.12.22 |
| Ubuntu16.04 ROS Kinetic 설치 (0) | 2020.12.21 |
- Total
- Today
- Yesterday
- 원격 통신
- python3
- sensehat
- Ubuntu20.04
- vue/cli
- 윈도우 복구
- Publisher
- C++
- HC-SR04
- 리눅스
- 코드리뷰
- set backspace
- Ubuntu16.04
- 우분투
- umount
- VirtualBox
- roslaunch
- Mount
- filesystem
- ROS
- 초음파센서
- VMware
- 아두이노 IDE
- 프로그래머스
- 윈도우
- 백준알고리즘
- 포트인식문제
- Python
- subscriber
- 8자주행
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |