
티스토리 뷰
1. 파이썬 코드 작성
msg_sender.py
#!/usr/bin/env python
import rospy
from msg_send.msg import my_msg
rospy.init_node('msg_sender', anonymous=True)
pub = rospy.Publisher('msg_to_xycar', my_msg)
msg = my_msg()
msg.first_name = "gildon"
msg.last_name = "Hong"
msg.id_number = 20041003
msg.phone_number = "010-8990-3003"
rate = rospy.Rate(1)
while not rospy.is_shutdown():
pub.publish(msg)
print("sending message")
rate.sleep()
msg_receiver.py
#!/usr/bin/env python
import rospy
from msg_send.msg import my_msg
def callback(msg):
print("1. Name : ", msg.last_name + msg.first_name)
print("2. ID : ", msg.id_number)
print("3. Phone Number : ", msg.phone_number)
rospy.init_node('msg_receiver', anonymous=True)
sub = rospy.Subscriber('msg_to_xycar', my_msg, callback)
rospy.spin()
실행권한 주기.
chmod +x msg_sender.py msg_receiver.py
2. 실행방법 1 (직접 실행)
빌드
cm
터미널#1에서
roscore
터미널#2에서
rosrun msg_send msg_receiver.py
아직은 아무것도 출력되지 않는다.
터미널#3에서
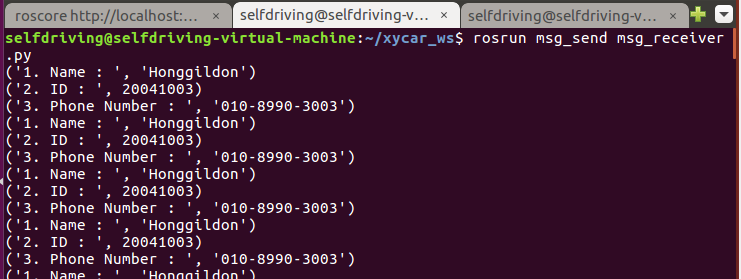
rosrun msg_send msg_sender.py위 명령어를 실행하면 publisher터미널(=터미널#3)에서는 아래와 같이 출력되고

터미널#2에서는 아래와 같이 출력된다.
3. 실행방법2 (roslaunch)
m_send_sr.launch를 아래와 같이 작성한다.
<launch>
<node pkg="msg_send" type="msg_sender.py" name="sender1"/>
<node pkg="msg_send" type="msg_sender.py" name="sender2"/>
<node pkg="msg_send" type="msg_receiver.py" name="receiver" output="screen"/>
</launch>
빌드
cm
roslaunch msg_send m_send_sr.launch위 명령어로 실행하면 아래와 같이 결과가 나온다.
위 명령어를 실행했을 때 실행이 안되는 오류가 있었는데, 가상머신을 재부팅했더니 해결:)
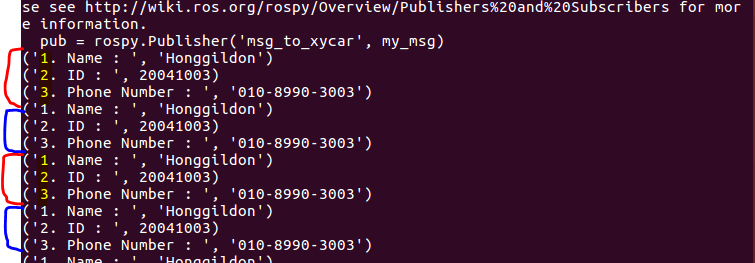
2개의 sender에게서 receiver가 msg를 한번씩 받아서 화면에 출력.
빨간색은 sender1에게서, 파란색은 sender2에게서 받은 msg이다.
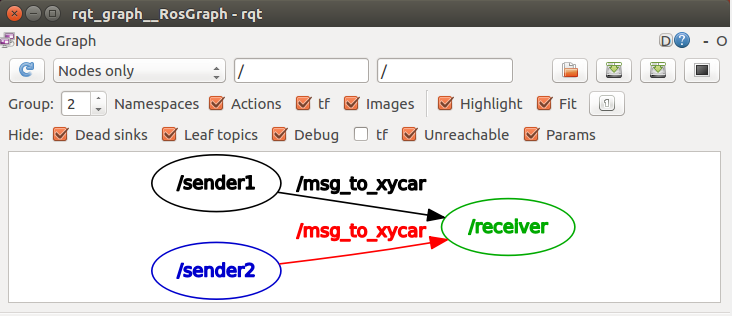
rqt_graph노드 관계를 확인하면 아래와 같다.
'ROS' 카테고리의 다른 글
| Ubuntu16.04 ROS Kinetic - 원격통신 환경 구축 및 실습 (0) | 2020.12.24 |
|---|---|
| Ubuntu16.04 ROS Kinetic - 통신1) 노드간 동기화 문제 (0) | 2020.12.24 |
| Ubuntu16.04 ROS Kinetic - turtlesim 8자 주행 답안 (0) | 2020.12.23 |
| Ubuntu16.04 ROS Kinetic - 커스텀 메시지 생성 (0) | 2020.12.23 |
| Ubuntu16.04 ROS Kinetic - N:N 노드 통신 (0) | 2020.12.23 |
댓글
공지사항
최근에 올라온 글
최근에 달린 댓글
- Total
- Today
- Yesterday
링크
TAG
- sensehat
- VMware
- ROS
- Ubuntu16.04
- set backspace
- Ubuntu20.04
- roslaunch
- 원격 통신
- filesystem
- 초음파센서
- 윈도우
- 리눅스
- Python
- 우분투
- Publisher
- Mount
- 프로그래머스
- 백준알고리즘
- 윈도우 복구
- VirtualBox
- umount
- 8자주행
- 아두이노 IDE
- python3
- subscriber
- 코드리뷰
- HC-SR04
- 포트인식문제
- vue/cli
- C++
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
글 보관함