
티스토리 뷰
1. 문제 : 데이터 크기에 따른 전송속도 측정
1초에 1번씩 다양한 용량의 long_string을 발행한다. 문자열은 #으로 가득 채운다.
발행하는 토픽 이름은 long_string, 타입은 String (문자열)
1M, 5M, 10M, 20M, 50M byte전송한다.
receiver측에서 수신속도 계산한다.
송수신 속도의 단위 : Bps (Byte/sec) 로 측정한다.
1-1. 소스 파일, 런치파일
sender_speed.py
#!/usr/bin/env python
import rospy
import time
from std_msgs.msg import String, Int32
rospy.init_node('Sender')
pub = rospy.Publisher('long_string', String, queue_size=10)
pubTime = rospy.Publisher('time', Int32, queue_size=10)
rate = rospy.Rate(1)
length = rospy.get_param('~length')
while not rospy.is_shutdown():
pubTime.publish(time.time())
pub.publish('#'*length)
rate.sleep()
receiver_speed.py
#!/usr/bin/env python
import rospy
import time
from std_msgs.msg import String, Int32
sendtime = 0
def callback(msg):
recvtime = time.time()
print len(msg.data), 'byte:\t', "{:.4f}".format((recvtime - sendtime)), 'seconds', "\t\tspeed: {:.2f}".format(len(msg.data)/(recvtime-sendtime)), 'bytes/s'
print
def callbackTime(msg):
global sendtime
sendtime = msg.data
rospy.init_node('Receiver')
subTime = rospy.Subscriber('time', Int32, callbackTime)
sub = rospy.Subscriber('long_string', String, callback)
rospy.spin()
sr_speed.launch
<launch>
<node pkg="msg_send" type="sender_speed.py" name="sender1M">
<param name="length" value="1000000"/>
</node>
<node pkg="msg_send" type="sender_speed.py" name="sender5M">
<param name="length" value="5000000"/>
</node>
<node pkg="msg_send" type="sender_speed.py" name="sender10M">
<param name="length" value="10000000"/>
</node>
<node pkg="msg_send" type="sender_speed.py" name="sender20M">
<param name="length" value="20000000"/>
</node>
<node pkg="msg_send" type="sender_speed.py" name="sender50M">
<param name="length" value="50000000"/>
</node>
<node pkg="msg_send" type="receiver_speed.py" name="receiver" output="screen"/>
</launch>
1-2. 빌드
cm
2. 현상 확인
roslaunch msg_send sr_speed.launch위 명령을 통해 실행한 결과는 아래와 같다.
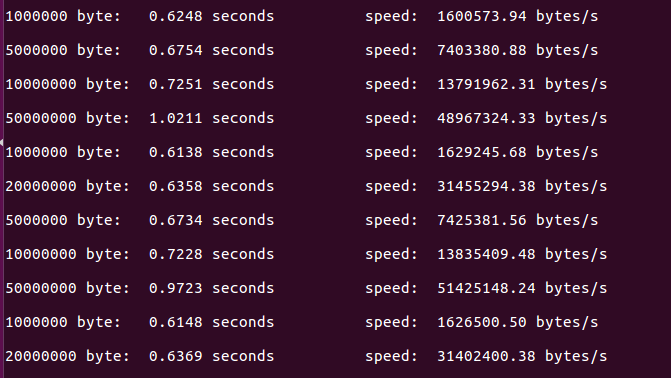
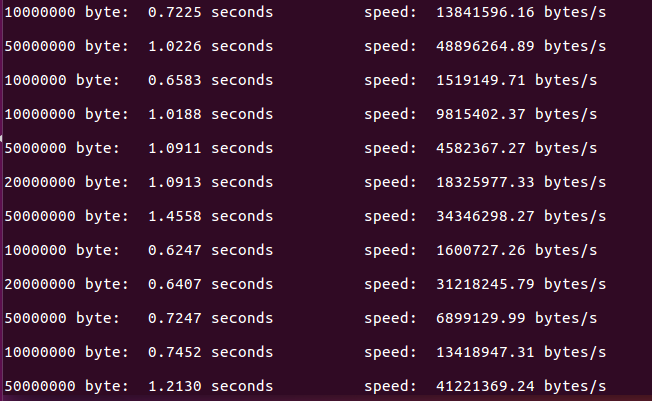
전송 바이트와 수신속도를 표로 나타내면 아래와 같다.
| 전송 바이트 (단위: bytes) | 수신 속도 (단위 Bps) | |||
| 1M | 1.6M | 1.6M | 1.5M | 1.6M |
| 5M | 7.4M | 7.4M | 4.6M | 6.9M |
| 10M | 13.8M | 13.8M | 9.8M | 13.4M |
| 20M | 31.4M | 31.4M | 18.3M | 31.2M |
| 50M | 49.0M | 51.4M | 48.9M | 41.2M |
각 전송 바이트마다 수신 속도는 비슷하다.
또 전송 바이트가 증가할수록 수신 속도 역시 증가하는 정비례관계를 가진다.
그래서 총 전송시간은 비슷한데, 10Mbytes가 넘어가면 보통 1초가 넘고, 10Mbytes이하이면 평균적으로 약 0.7초가 걸린다.
3. 고찰
각 전송 바이트마다 수신 속도가 비슷하게 측정되었다.
수신 속도는 전송 바이트가 증가할 수록 증가하는, 정비례 관계를 갖는다.
4. 참고자료
1) 파이썬 소수점 출력
Why I get AttributeError: 'float' object has no attribute '3f'?
I am getting this error: AttributeError: 'float' object has no attribute '3f' I don't understand why I am getting it, I am following the example straight from the book "applied text analysis" The
datascience.stackexchange.com
'ROS' 카테고리의 다른 글
| Ubuntu16.04 ROS Kinetic - 초음파센서(HC-SR04) 실습 (0) | 2021.01.14 |
|---|---|
| /dev/ttyUSB0 권한없음 오류 해결 과정 (삽질) (0) | 2021.01.14 |
| Ubuntu16.04 ROS Kinetic - 통신5) 노드의 순차 실행 (0) | 2020.12.28 |
| Ubuntu16.04 ROS Kinetic - 통신4) 타임슬롯 문제 (0) | 2020.12.28 |
| Ubuntu16.04 ROS Kinetic - 통신3) 처리 지연 문제 (0) | 2020.12.28 |
- Total
- Today
- Yesterday
- 윈도우
- 리눅스
- 원격 통신
- vue/cli
- 프로그래머스
- umount
- Ubuntu16.04
- 우분투
- VMware
- roslaunch
- Publisher
- python3
- C++
- subscriber
- set backspace
- 백준알고리즘
- sensehat
- 아두이노 IDE
- HC-SR04
- 초음파센서
- 윈도우 복구
- ROS
- 8자주행
- Mount
- filesystem
- Ubuntu20.04
- 포트인식문제
- VirtualBox
- 코드리뷰
- Python
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |